
[ad_1]
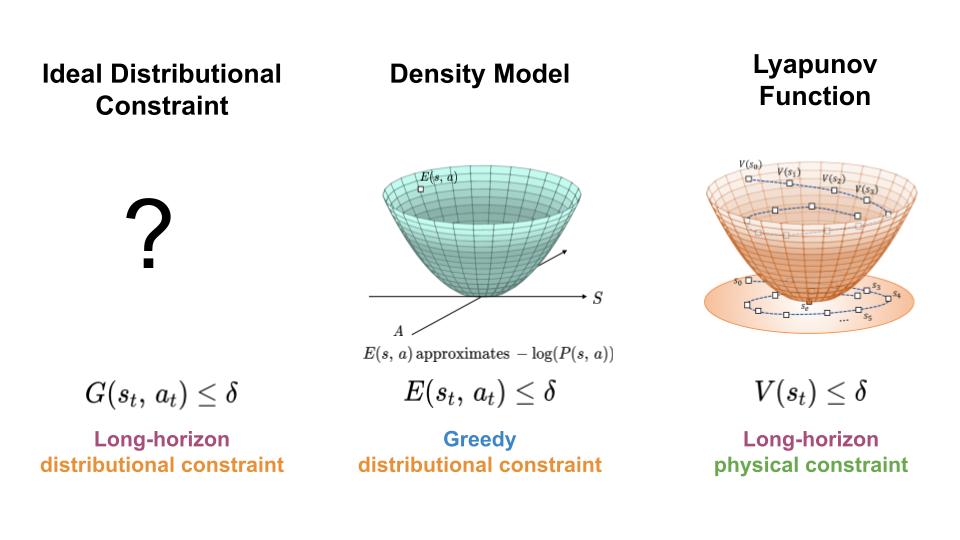
To manage the distribution shift expertise by learning-based controllers, we search a mechanism for constraining the agent to areas of excessive information density all through its trajectory (left). Right here, we current an method which achieves this aim by combining options of density fashions (center) and Lyapunov features (proper).
With a purpose to make use of machine studying and reinforcement studying in controlling actual world techniques, we should design algorithms which not solely obtain good efficiency, but in addition work together with the system in a protected and dependable method. Most prior work on safety-critical management focuses on sustaining the protection of the bodily system, e.g. avoiding falling over for legged robots, or colliding into obstacles for autonomous automobiles. Nonetheless, for learning-based controllers, there may be one other supply of security concern: as a result of machine studying fashions are solely optimized to output appropriate predictions on the coaching information, they’re susceptible to outputting inaccurate predictions when evaluated on out-of-distribution inputs. Thus, if an agent visits a state or takes an motion that may be very completely different from these within the coaching information, a learning-enabled controller could “exploit” the inaccuracies in its realized element and output actions which can be suboptimal and even harmful.
To stop these potential “exploitations” of mannequin inaccuracies, we suggest a brand new framework to motive concerning the security of a learning-based controller with respect to its coaching distribution. The central thought behind our work is to view the coaching information distribution as a security constraint, and to attract on instruments from management concept to manage the distributional shift skilled by the agent throughout closed-loop management. Extra particularly, we’ll focus on how Lyapunov stability might be unified with density estimation to supply Lyapunov density fashions, a brand new type of security “barrier” operate which can be utilized to synthesize controllers with ensures of protecting the agent in areas of excessive information density. Earlier than we introduce our new framework, we’ll first give an outline of current methods for guaranteeing bodily security through barrier operate.
In management concept, a central subject of research is: given identified system dynamics, $s_{t+1}=f(s_t, a_t)$, and identified system constraints, $s in C$, how can we design a controller that’s assured to maintain the system throughout the specified constraints? Right here, $C$ denotes the set of states which can be deemed protected for the agent to go to. This drawback is difficult as a result of the desired constraints have to be happy over the agent’s whole trajectory horizon ($s_t in C$ $forall 0leq t leq T$). If the controller makes use of a easy “grasping” technique of avoiding constraint violations within the subsequent time step (not taking $a_t$ for which $f(s_t, a_t) notin C$), the system should still find yourself in an “irrecoverable” state, which itself is taken into account protected, however will inevitably result in an unsafe state sooner or later whatever the agent’s future actions. With a purpose to keep away from visiting these “irrecoverable” states, the controller should make use of a extra “long-horizon” technique which entails predicting the agent’s whole future trajectory to keep away from security violations at any level sooner or later (keep away from $a_t$ for which all potential ${ a_{hat{t}} }_{hat{t}=t+1}^H$ result in some $bar{t}$ the place $s_{bar{t}} notin C$ and $t<bar{t} leq T$). Nonetheless, predicting the agent’s full trajectory at each step is extraordinarily computationally intensive, and infrequently infeasible to carry out on-line throughout run-time.
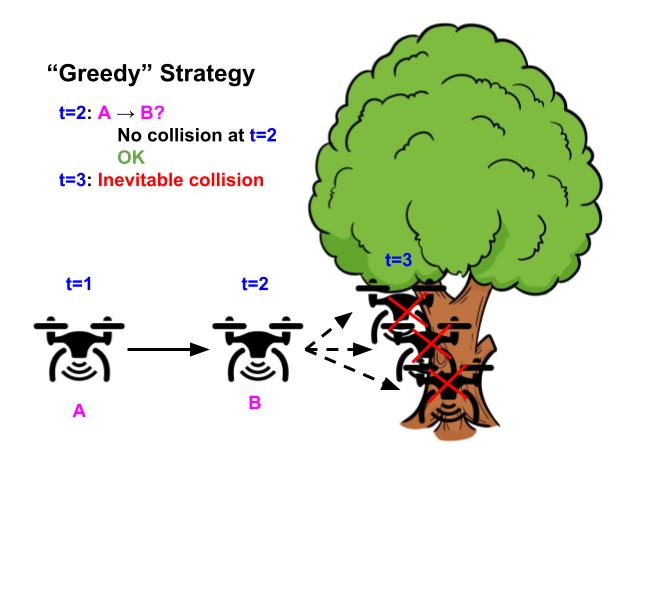
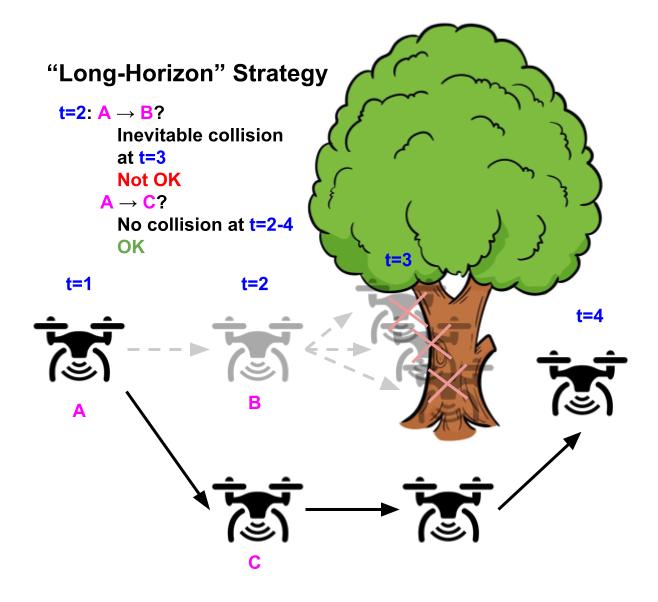
Illustrative instance of a drone whose aim is to fly as straight as potential whereas avoiding obstacles. Utilizing the “grasping” technique of avoiding security violations (left), the drone flies straight as a result of there’s no impediment within the subsequent timestep, however inevitably crashes sooner or later as a result of it may possibly’t flip in time. In distinction, utilizing the “long-horizon” technique (proper), the drone turns early and efficiently avoids the tree, by contemplating your complete future horizon way forward for its trajectory.
Management theorists sort out this problem by designing “barrier” features, $v(s)$, to constrain the controller at every step (solely permit $a_t$ which fulfill $v(f(s_t, a_t)) leq 0$). With a purpose to make sure the agent stays protected all through its whole trajectory, the constraint induced by barrier features ($v(f(s_t, a_t))leq 0$) prevents the agent from visiting each unsafe states and irrecoverable states which inevitably result in unsafe states sooner or later. This technique basically amortizes the computation of trying into the long run for inevitable failures when designing the protection barrier operate, which solely must be finished as soon as and might be computed offline. This fashion, at runtime, the coverage solely must make use of the grasping constraint satisfaction technique on the barrier operate $v(s)$ so as to guarantee security for all future timesteps.

The blue area denotes the of states allowed by the barrier operate constraint, $ v(s) leq 0$. Utilizing a “long-horizon” barrier operate, the drone solely must greedily be sure that the barrier operate constraint $v(s) leq 0$ is happy for the following state, so as to keep away from security violations for all future timesteps.
Right here, we used the notion of a “barrier” operate as an umbrella time period to explain plenty of completely different sorts of features whose functionalities are to constrain the controller so as to make long-horizon ensures. Some particular examples embody management Lyapunov features for guaranteeing stability, management barrier features for guaranteeing normal security constraints, and the worth operate in Hamilton-Jacobi reachability for guaranteeing normal security constraints below exterior disturbances. Extra lately, there has additionally been some work on studying barrier features, for settings the place the system is unknown or the place barrier features are troublesome to design. Nonetheless, prior works in each conventional and learning-based barrier features are primarily centered on making ensures of bodily security. Within the subsequent part, we’ll focus on how we are able to lengthen these concepts to manage the distribution shift skilled by the agent when utilizing a learning-based controller.
To stop mannequin exploitation attributable to distribution shift, many learning-based management algorithms constrain or regularize the controller to stop the agent from taking low-likelihood actions or visiting low probability states, as an example in offline RL, model-based RL, and imitation studying. Nonetheless, most of those strategies solely constrain the controller with a single-step estimate of the info distribution, akin to the “grasping” technique of protecting an autonomous drone protected by stopping actions which causes it to crash within the subsequent timestep. As we noticed within the illustrative figures above, this technique just isn’t sufficient to ensure that the drone is not going to crash (or go out-of-distribution) in one other future timestep.
How can we design a controller for which the agent is assured to remain in-distribution for its whole trajectory? Recall that barrier features can be utilized to ensure constraint satisfaction for all future timesteps, which is precisely the type of assure we hope to make almost about the info distribution. Based mostly on this commentary, we suggest a brand new type of barrier operate: the Lyapunov density mannequin (LDM), which merges the dynamics-aware side of a Lyapunov operate with the data-aware side of a density mannequin (it’s the truth is a generalization of each forms of operate). Analogous to how Lyapunov features retains the system from changing into bodily unsafe, our Lyapunov density mannequin retains the system from going out-of-distribution.
An LDM ($G(s, a)$) maps state and motion pairs to unfavorable log densities, the place the values of $G(s, a)$ signify the very best information density the agent is ready to keep above all through its trajectory. It may be intuitively regarded as a “dynamics-aware, long-horizon” transformation on a single-step density mannequin ($E(s, a)$), the place $E(s, a)$ approximates the unfavorable log probability of the info distribution. Since a single-step density mannequin constraint ($E(s, a) leq -log(c)$ the place $c$ is a cutoff density) would possibly nonetheless permit the agent to go to “irrecoverable” states which inevitably causes the agent to go out-of-distribution, the LDM transformation will increase the worth of these “irrecoverable” states till they turn out to be “recoverable” with respect to their up to date worth. Because of this, the LDM constraint ($G(s, a) leq -log(c)$) restricts the agent to a smaller set of states and actions which excludes the “irrecoverable” states, thereby making certain the agent is ready to stay in excessive data-density areas all through its whole trajectory.
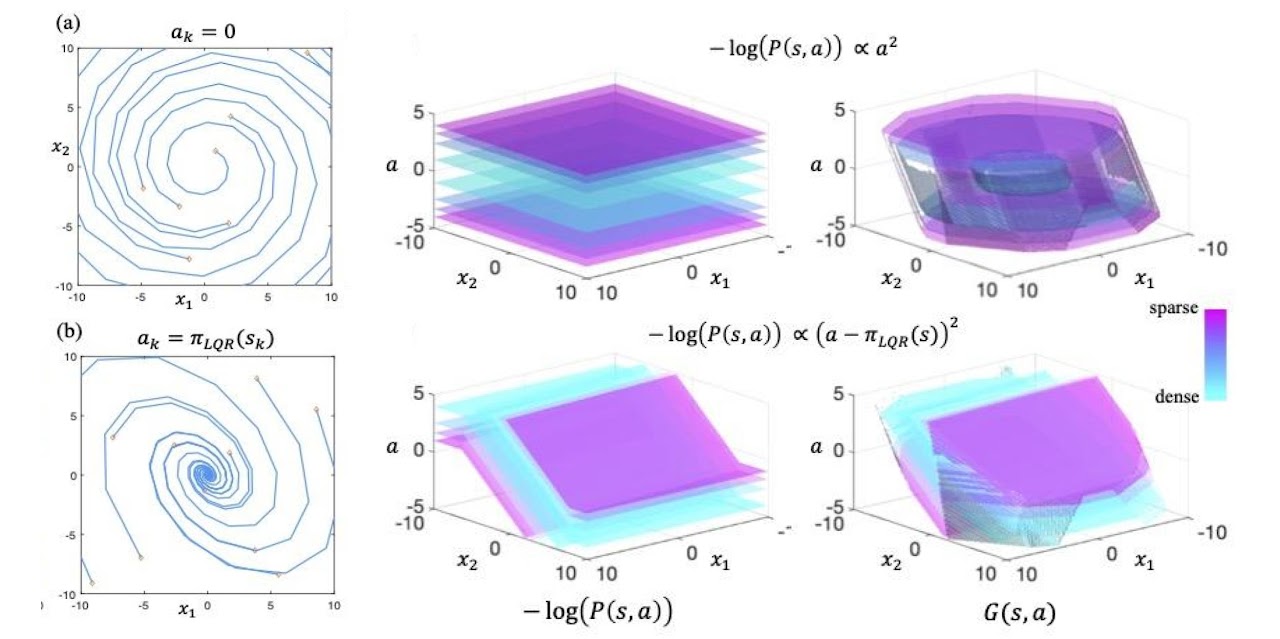
Instance of information distributions (center) and their related LDMs (proper) for a 2D linear system (left). LDMs might be considered as “dynamics-aware, long-horizon” transformations on density fashions.
How precisely does this “dynamics-aware, long-horizon” transformation work? Given a knowledge distribution $P(s, a)$ and dynamical system $s_{t+1} = f(s_t, a_t)$, we outline the next because the LDM operator: $mathcal{T}G(s, a) = max{-log P(s, a), min_{a’} G(f(s, a), a’)}$. Suppose we initialize $G(s, a)$ to be $-log P(s, a)$. Beneath one iteration of the LDM operator, the worth of a state motion pair, $G(s, a)$, can both stay at $-log P(s, a)$ or enhance in worth, relying on whether or not the worth at the very best state motion pair within the subsequent timestep, $min_{a’} G(f(s, a), a’)$, is bigger than $-log P(s, a)$. Intuitively, if the worth at the very best subsequent state motion pair is bigger than the present $G(s, a)$ worth, which means that the agent is unable to stay on the present density degree no matter its future actions, making the present state “irrecoverable” with respect to the present density degree. By rising the present the worth of $G(s, a)$, we’re “correcting” the LDM such that its constraints wouldn’t embody “irrecoverable” states. Right here, one LDM operator replace captures the impact of trying into the long run for one timestep. If we repeatedly apply the LDM operator on $G(s, a)$ till convergence, the ultimate LDM might be freed from “irrecoverable” states within the agent’s whole future trajectory.
To make use of an LDM in management, we are able to prepare an LDM and learning-based controller on the identical coaching dataset and constrain the controller’s motion outputs with an LDM constraint ($G(s, a)) leq -log(c)$). As a result of the LDM constraint prevents each states with low density and “irrecoverable” states, the learning-based controller will be capable of keep away from out-of-distribution inputs all through the agent’s whole trajectory. Moreover, by selecting the cutoff density of the LDM constraint, $c$, the consumer is ready to management the tradeoff between defending towards mannequin error vs. flexibility for performing the specified activity.
Instance analysis of ours and baseline strategies on a hopper management activity for various values of constraint thresholds (x- axis). On the fitting, we present instance trajectories from when the edge is simply too low (hopper falling over attributable to extreme mannequin exploitation), good (hopper efficiently hopping in direction of goal location), or too excessive (hopper standing nonetheless attributable to over conservatism).
Up to now, we’ve solely mentioned the properties of a “good” LDM, which might be discovered if we had oracle entry to the info distribution and dynamical system. In follow, although, we approximate the LDM utilizing solely information samples from the system. This causes an issue to come up: despite the fact that the position of the LDM is to stop distribution shift, the LDM itself also can endure from the unfavorable results of distribution shift, which degrades its effectiveness for stopping distribution shift. To know the diploma to which the degradation occurs, we analyze this drawback from each a theoretical and empirical perspective. Theoretically, we present even when there are errors within the LDM studying process, an LDM constrained controller remains to be capable of keep ensures of protecting the agent in-distribution. Albeit, this assure is a bit weaker than the unique assure supplied by an ideal LDM, the place the quantity of degradation depends upon the size of the errors within the studying process. Empirically, we approximate the LDM utilizing deep neural networks, and present that utilizing a realized LDM to constrain the learning-based controller nonetheless gives efficiency enhancements in comparison with utilizing single-step density fashions on a number of domains.
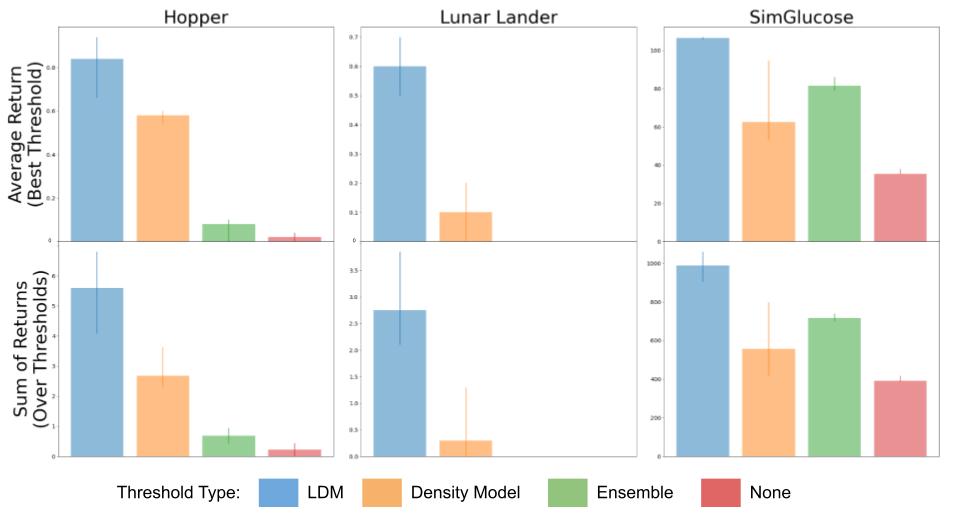
Analysis of our technique (LDM) in comparison with constraining a learning-based controller with a density mannequin, the variance over an ensemble of fashions, and no constraint in any respect on a number of domains together with hopper, lunar lander, and glucose management.
At present, one of many largest challenges in deploying learning-based controllers on actual world techniques is their potential brittleness to out-of-distribution inputs, and lack of ensures on efficiency. Conveniently, there exists a big physique of labor in management concept centered on making ensures about how techniques evolve. Nonetheless, these works normally deal with making ensures with respect to bodily security necessities, and assume entry to an correct dynamics mannequin of the system in addition to bodily security constraints. The central thought behind our work is to as an alternative view the coaching information distribution as a security constraint. This permits us to make use of those concepts in controls in our design of learning-based management algorithms, thereby inheriting each the scalability of machine studying and the rigorous ensures of management concept.
This submit is predicated on the paper “Lyapunov Density Fashions: Constraining Distribution Shift in Studying-Based mostly Management”, introduced at ICML 2022. You
discover extra particulars in our paper and on our web site. We thank Sergey Levine, Claire Tomlin, Dibya Ghosh, Jason Choi, Colin Li, and Homer Walke for his or her priceless suggestions on this weblog submit.
[ad_2]